
Il teorema di Varignon, in Meccanica, afferma che la somma dei momenti prodotti da un sistema di forze concorrenti rispetto ad un certo punto è uguale al momento della forza risultante rispetto allo stesso punto.
Per questo motivo questo teorema è noto anche come l'inizio dei momenti.
Sebbene il primo ad enunciarlo sia stato l'olandese Simon Stevin (1548-1620), l'ideatore del paradosso idrostatico, il matematico francese Pierre Varignon (1654-1722) fu colui che in seguito gli diede la sua forma definitiva.
Un esempio di come funziona il teorema di Varignon in Meccanica è il seguente: supponiamo che un semplice sistema di due forze complanari e concorrenti agisca su un punto F1 Y FDue, (indicato in grassetto a causa del loro carattere vettoriale). Queste forze danno origine a una forza netta o risultante, chiamata FR.
Ogni forza esercita una coppia o un momento attorno a un punto O, che viene calcolato dal prodotto vettoriale tra il vettore di posizione rOPERAZIONE e la forza F, dove rOPERAZIONE è diretto da O al punto di concorrenza P:
MO1 = rOPERAZIONE × F1
MO2 = rOPERAZIONE × FDue
dato che FR = F1 + FDue, poi:
MO = rOPERAZIONE × F1 + rOPERAZIONE × FDue = MO1 + MO2
Ma come rOPERAZIONE è un fattore comune, quindi, l'applicazione della proprietà distributiva al prodotto incrociato:
MO = rOPERAZIONE × (F1 + FDue) = rOPERAZIONE × FR
Pertanto, la somma dei momenti o delle coppie di ciascuna forza rispetto al punto O è equivalente al momento della forza risultante rispetto allo stesso punto.
Sia un sistema di N forze concorrenti, formato da F1, FDue, F3... FN, le cui linee di azione si intersecano nel punto P (vedi figura 1), momento di questo sistema di forze MO, rispetto ad un punto O è dato da:
MO = rOPERAZIONE × F1 + rOPERAZIONE × FDue + rOPERAZIONE × F3 +... rOPERAZIONE × FN = rOPERAZIONE × (F1 + FDue + F3 +... FN)
Per dimostrare il teorema, si usa la proprietà distributiva del prodotto vettoriale tra vettori.
Sii le forze F1, FDue, F3... FN applicato ai punti A1, PERDue, PER3… PERN e concorrente al punto P. Il momento risultante di questo sistema, rispetto ad un punto O, chiamato MO, è la somma dei momenti di ciascuna forza, rispetto a detto punto:
MO = ∑ rOAi × Fio
Dove la somma va da i = 1 a i = N, poiché ci sono N forze. Trattandosi di forze concorrenti e poiché il prodotto vettoriale tra vettori paralleli è zero, accade che:
rPAi × Fio = 0
Con il vettore nullo indicato come 0.
Il momento di una delle forze rispetto a O, ad esempio quello della forza Fio applicato in Aio, è scritto così:
Mho sentito = rOAi × Fio
Il vettore di posizione rOAi può essere espresso come la somma di due vettori di posizione:
rOAi = rOPERAZIONE + rPAi
In questo modo, il momento circa O della forza Fio è:
Mho sentito = (rOPERAZIONE + rPAi) × Fio = (rOPERAZIONE × Fio) + (rPAi × Fio)
Ma l'ultimo termine è nullo, come spiegato sopra, perché rPAi è sulla linea di azione di Fio, Quindi:
Mho sentito = rOPERAZIONE × Fio
Sapendo che il momento del sistema rispetto al punto O è la somma di tutti i singoli momenti di ciascuna forza rispetto a detto punto, allora:
MO = ∑ Mho sentito = ∑ rOPERAZIONE × Fio
Che cosa rOPERAZIONE è costante esce dalla somma:
MO = rOPERAZIONE × (∑ Fio)
Ma ∑ Fio è semplicemente la forza netta o la forza risultante FR, si conclude quindi immediatamente che:
MO = rOPERAZIONE × FR
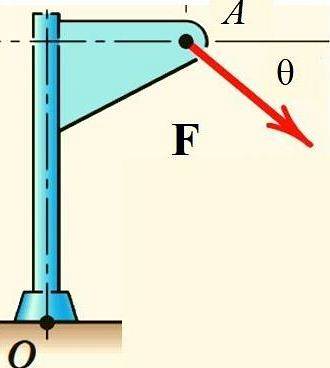
Il teorema di Varignon facilita il calcolo del momento di forza F Rispetto al punto O nella struttura mostrata in figura, se la forza viene scomposta nelle sue componenti rettangolari e si calcola il momento di ciascuna di esse:
Quando la forza risultante di un sistema è nota, il teorema di Varignon può essere applicato per sostituire la somma di ciascuno dei momenti prodotti dalle forze che lo compongono dal momento della risultante.
Se il sistema è costituito da forze sullo stesso piano e il punto rispetto al quale si vuole calcolare il momento appartiene a quel piano, il momento risultante è perpendicolare.
Ad esempio, se tutte le forze sono nel piano xy, il momento è diretto sull'asse z e non resta che trovare la sua grandezza e il suo senso, come nel caso dell'esempio sopra descritto.
In questo caso, il teorema di Varignon ci permette di calcolare il momento risultante del sistema tramite la somma. È molto utile nel caso di un sistema di forza tridimensionale, per il quale la direzione del momento risultante non è nota a priori.
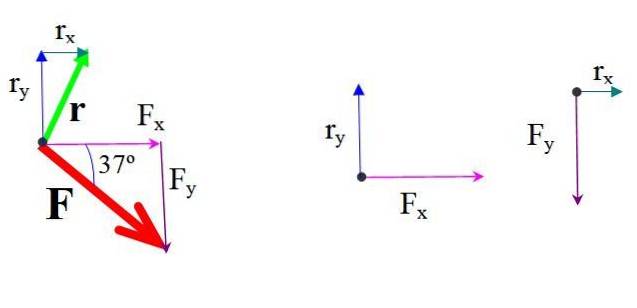
Per risolvere questi esercizi, è conveniente scomporre le forze e posizionare i vettori nelle loro componenti rettangolari e, dalla somma dei momenti, determinare le componenti del momento netto.
Usando il teorema di Varignon, calcola il momento della forza F attorno al punto O mostrato in figura se la grandezza di F è 725 N.
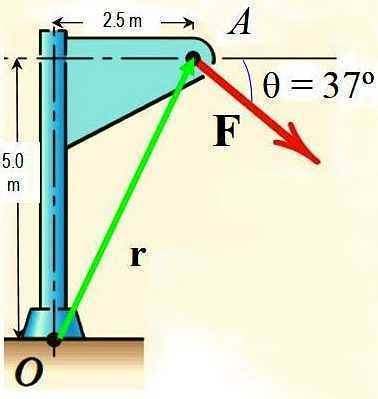
Per applicare il teorema di Varignon, scomponi la forza F in due componenti, i cui rispettivi momenti intorno a O vengono calcolati e sommati per ottenere il momento risultante.
FX = 725 N ∙ cos 37 º = 579,0 N
FY = - 725 N N ∙ sin 37 º = −436,3 N
Allo stesso modo, il vettore di posizione r diretto da O ad A ha i componenti:
rX = 2,5 m
rY = 5,0 m
Il momento di ciascuna componente della forza attorno a O si trova moltiplicando la forza e la distanza perpendicolare.
Entrambe le forze tendono a ruotare la struttura nella stessa direzione, che in questo caso è in senso orario, a cui viene arbitrariamente assegnato un segno positivo:
MBue = FX∙ rY ∙ sin 90º = 579,0 N ∙ 5,0 m = 2895 N ∙ m
MOy = FY∙ rX ∙ sin (−90º) = −436,3 N ∙ 2,5 m ∙ (−1) = 1090,8 N ∙ m
Il momento risultante su O è:
MO = MBue + MOy = 3985,8 N ∙ m perpendicolare al piano e in senso orario.

Nessun utente ha ancora commentato questo articolo.