
Il momento d'inerzia di un corpo rigido rispetto ad un certo asse di rotazione, rappresenta la sua resistenza al variare della sua velocità angolare attorno a detto asse. È proporzionale alla massa e anche alla posizione dell'asse di rotazione, poiché il corpo, in base alla sua geometria, può ruotare più facilmente attorno a determinati assi rispetto ad altri.
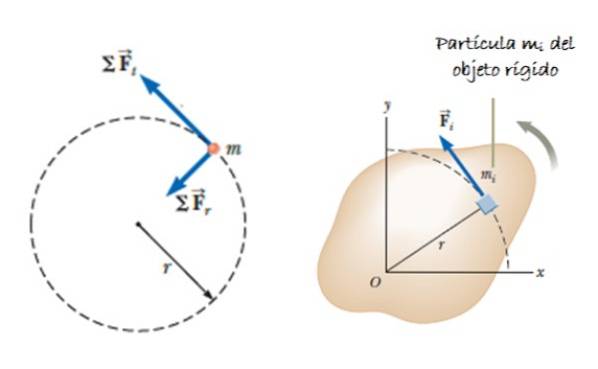
Supponiamo che un oggetto di grandi dimensioni (composto da molte particelle) possa ruotare attorno a un asse. Supponiamo che una forza agisca F, applicato tangenzialmente sull'elemento massa Δmio, che produce una coppia o un momento, dato da τnetto = ∑rio X Fio. Il vettore rio è la posizione di Δmio (vedi figura 2).

Questo momento è perpendicolare al piano di rotazione (direzione +k = che esce dalla carta). Poiché la forza e il vettore di posizione radiale sono sempre perpendicolari, il prodotto incrociato rimane:
τnetto = ∑ Fio rio K = ∑ (Δmio perio) rio K = ∑ Δmio (perio rio ) K
Accelerazione aio rappresenta la componente tangenziale dell'accelerazione, poiché l'accelerazione radiale non contribuisce alla coppia. In funzione dell'accelerazione angolare α, possiamo indicare che:
perio = α rio
Pertanto la coppia netta si presenta così:
τnetto = ∑ Δmio (α rioDue) k = (∑ rioDue Δmio) α K
L'accelerazione angolare α è la stessa per l'intero oggetto, quindi non è influenzata dal pedice “i” e può lasciare la sommatoria, che è appunto il momento d'inerzia dell'oggetto simboleggiato dalla lettera I:
I = ∑ rioDue Δmio
Questo è il momento di inerzia di una distribuzione di massa discreta. Quando la distribuzione è continua, la somma viene sostituita con un integrale e Δm diventa un differenziale di massa dm. L'integrale viene eseguito sull'intero oggetto:
I = ∫M(rDue) dm
Le unità del momento di inerzia nel Sistema Internazionale SI sono kg x mDue. È una quantità scalare e positiva, poiché è il prodotto di una massa per il quadrato di una distanza.
Indice articolo
Un oggetto esteso, come una barra, un disco, una sfera o altro, la cui densità ρ è costante e sapendo che la densità è il rapporto massa - volume, il differenziale di massa dm è scritto come:
ρ = dm / dV → dm = ρdV
Sostituendo nell'integrale il momento d'inerzia, abbiamo:
I = ∫rDue ρdV = ρ ∫rDuedV
Questa è un'espressione generale, valida per un oggetto tridimensionale, il cui volume V e posizione r sono funzioni delle coordinate spaziali X, Y Y z. Notare che essendo costante, la densità è al di fuori dell'integrale.
La densità ρ È anche conosciuta come densità volumetrica, ma se l'oggetto è molto piatto, come un foglio o molto sottile e stretto come un'asta, si possono utilizzare altre forme di densità, vediamo:
- Per un foglio molto sottile, la densità da utilizzare è σ, la densità superficiale (massa per unità di area) e dà è il differenziale di area.
- E se è una barra sottile, dove è rilevante solo la lunghezza, viene utilizzata la densità di massa lineare λ e un differenziale di lunghezza, secondo l'asse utilizzato come riferimento.
Negli esempi seguenti, tutti gli oggetti sono considerati rigidi (non deformabili) e hanno densità uniforme.
Qui andiamo a calcolare il momento d'inerzia di una barra sottile, rigida, omogenea di lunghezza L e massa M, rispetto ad un asse passante per il centro.
Innanzitutto, è necessario stabilire un sistema di coordinate e costruire una figura con la geometria appropriata, in questo modo:
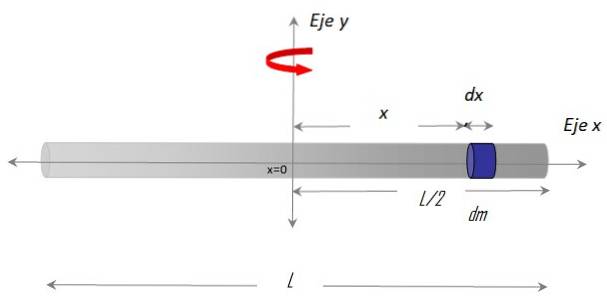
Il Asse X. lungo il bar e il Asse y come asse di rotazione. La procedura per stabilire l'integrale prevede anche la scelta di un differenziale di massa sulla barra, chiamato dm, che ha una lunghezza differenziale dx e si trova nella posizione X arbitrario, relativo al centro x = 0.
Secondo la definizione di densità di massa lineare λ:
λ = M / L
Poiché la densità è uniforme, che è valida per M e L, è valida anche per dm e dx:
λ = dm / dx → dm = λdx.
D'altra parte, l'elemento massa è nella posizione X, quindi sostituendo questa geometria nella definizione, abbiamo un integrale definito, i cui limiti sono le estremità della barra secondo il sistema di coordinate:
Sostituendo la densità lineare λ = M / L:
Per trovare il momento di inerzia della barra rispetto ad un altro asse di rotazione, ad esempio quello che passa per uno dei suoi estremi, puoi utilizzare il teorema di Steiner (vedi esercizio risolto alla fine) oppure eseguire un calcolo diretto simile a quello mostrato qui, ma modificando la geometria in modo appropriato.
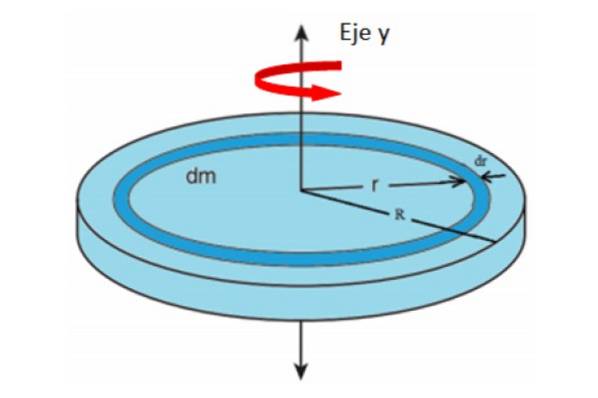
Un disco molto sottile di spessore trascurabile è una figura piatta. Se la massa è distribuita uniformemente su tutta la superficie dell'area A, la densità di massa σ è:
σ = M / Y
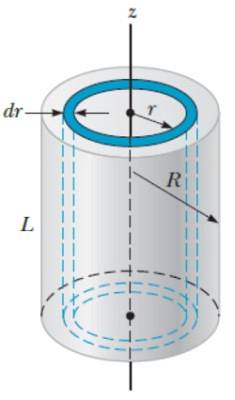
Tanto dm Che cosa dà corrispondono alla massa e all'area dell'anello differenziale mostrate in figura. Assumeremo che l'intero assieme ruoti attorno all'asse y.
Puoi immaginare che il disco sia composto da molti anelli concentrici di raggio r, ciascuno con il suo rispettivo momento di inerzia. Sommando i contributi di tutti gli anelli fino a raggiungere il raggio R, sarà il momento d'inerzia totale del disco.
σ = dm / dA → dm = σdà
Dove M rappresenta l'intera massa del disco. L'area di un disco dipende dal suo raggio r come:
A = π.rDue
Derivando rispetto a r:
dA / dr = 2 = 2π.r → dA = 2π.rdr
Sostituendo quanto sopra nella definizione di I:
Sostituendo σ = M / (π.RDue ) rimane:
%5Cleft&space;(%5Cfrac%7BR%5E%7B4%7D%7D%7B4%7D&space;%5Cright&space;)=%5Cfrac%7B1%7D%7B2%7DMR%5E%7B2%7D)
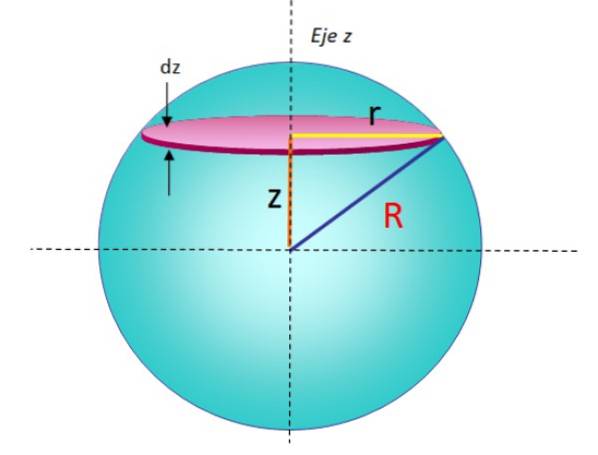
Una sfera di raggio R può essere pensata come una serie di dischi impilati uno sopra l'altro, dove ogni disco di massa infinitesimale dm, Radio r e spessore dz, ha un momento di inerzia dato da:
ha datodisco = (½) rDuedm
Per trovare questo differenziale, abbiamo semplicemente preso la formula dalla sezione precedente e sostituita M Y R per dm Y r, rispettivamente. Un disco come questo può essere visto nella geometria della figura 5.
Sommando tutti i momenti di inerzia infinitesimi dei dischi impilati si ottiene il momento di inerzia totale della sfera:
iosfera = ∫dIdisco
Che è equivalente a:
I = ∫sfera (½) rDuedm
Per risolvere l'integrale devi esprimere dm propriamente. Come sempre, si ottiene dalla densità:
ρ = M / V = dm / dV → dm = ρ.dV
Il volume di un disco differenziale è:
dV = Area della base x altezza
L'altezza del disco è lo spessore dz, mentre l'area della base è πrDue, Quindi:
dV = πrDuedz
E sostituendo nell'integrale proposto sarebbe simile a questo:
I = ∫sfera(½) rDuedm = ∫ (½) rDue(ρπrDuedz)
Ma prima dell'integrazione, si deve osservare che r -il raggio del disco- dipende da ze R -il raggio della sfera-, come si può vedere dalla figura 5. Usando il teorema di Pitagora:
RDue = rDue + zDue → rDue = RDue - zDue
Il che ci porta a:
I = ∫sfera(½) ρ rDue(πrDuedz) = ∫sfera(½) ρ π r4dz= ∫sfera(½) ρ π (RDue - zDue)Due dz
Per integrare l'intera sfera, notiamo che z varia tra -R e R, quindi:
Sapendo ciò ρ = M / V = M / [(4/3) πR3] infine si ottiene, dopo aver semplificato:
Per questo oggetto viene utilizzato un metodo simile a quello utilizzato per la sfera, solo che questa volta è più semplice se si immagina che il cilindro sia formato da gusci cilindrici di raggio r, spessore dr e altezza H, come se fossero gli strati di una cipolla.
Il volume dV di uno strato cilindrico è:
dV = 2π.rL.dr
Pertanto la massa del guscio è:
dm = ρ.dV = ρ. 2π.r.L.dr
Questa espressione è sostituita nella definizione di momento di inerzia:
L'equazione precedente indica che il momento d'inerzia del cilindro non dipende dalla sua lunghezza, ma solo dalla sua massa e dal suo raggio. sì L modificato, il momento di inerzia attorno all'asse assiale rimarrebbe lo stesso. Per questa ragione, io del cilindro coincide con quello del disco sottile calcolato in precedenza.
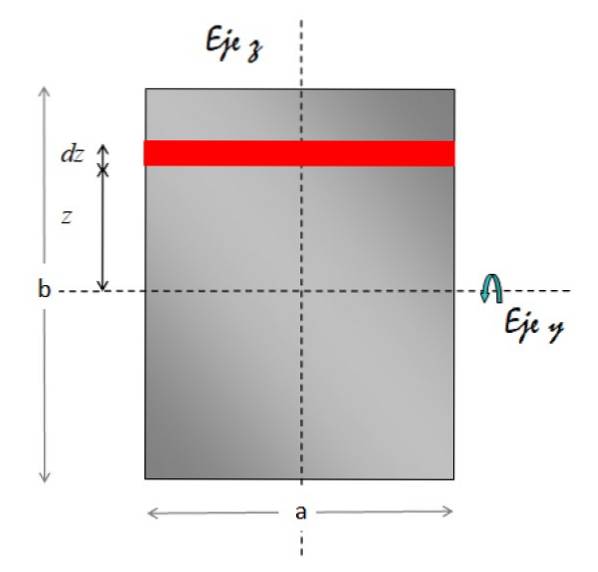
Il Asse y asse di rotazione orizzontale. La figura seguente mostra la geometria richiesta per eseguire l'integrazione:
L'elemento dell'area contrassegnato in rosso è rettangolare. La sua area è base x altezza, quindi:
dA = a.dz
Pertanto il differenziale di massa è:
dm = σ.dA = σ. (a.dz)
Per quanto riguarda la distanza dall'elemento area all'asse di rotazione, è sempre z. Sostituiamo tutto questo nell'integrale del momento d'inerzia:
Ora la densità di massa superficiale σ è sostituita da:
σ = M / ab
E sembra decisamente così:
Nota che è come quello con la barra sottile.
Per un quadrato laterale L, nell'espressione precedente valida per un rettangolo, è sufficiente sostituire il valore di b per quello di L:
Ci sono due teoremi che sono particolarmente utili per semplificare il calcolo dei momenti di inerzia su altri assi, che altrimenti potrebbero essere difficili da trovare per mancanza di simmetria. Questi teoremi sono:
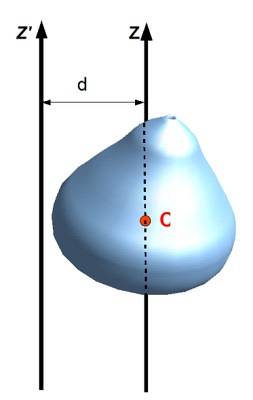
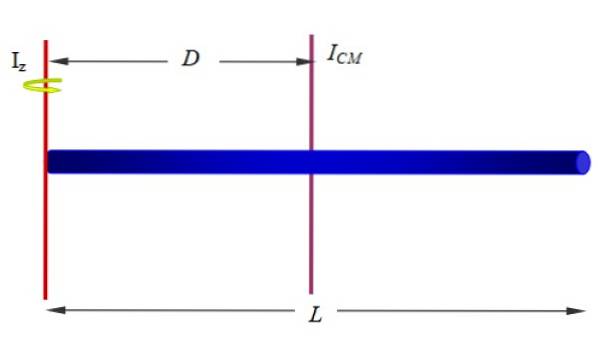
Chiamato anche teorema degli assi paralleli, mette in relazione il momento d'inerzia rispetto ad un asse con un altro che passa per il centro di massa dell'oggetto, purché gli assi siano paralleli. Per applicarlo è necessario conoscere la distanza D tra i due assi e ovviamente la massa M dell'oggetto.
Essere ioz il momento di inerzia di un oggetto esteso rispetto al asse z, ICM il momento di inerzia rispetto ad un asse che passa per il centro di massa (CM) di detto oggetto, allora è vero che:
ioz = ICM + MDDue
O nella notazione della figura seguente: ioz ' = Iz + MdDue
Questo teorema è applicato alle superfici piane e funziona così: il momento di inerzia di un oggetto piano attorno a un asse perpendicolare ad esso è la somma dei momenti di inerzia attorno a due assi perpendicolari al primo asse:
ioz = IX + ioY
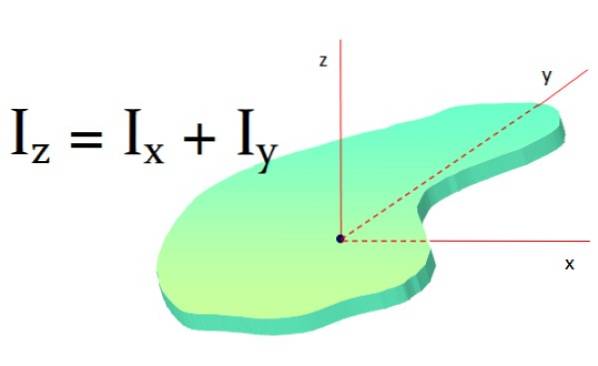
Se l'oggetto ha una simmetria tale che ioX e ioY sono uguali, allora è vero che:
ioz = 2IX
Trova il momento di inerzia della barra rispetto ad un asse che passa per una delle sue estremità, come mostrato in figura 1 (sotto ea destra) e figura 10.
Soluzione:
Abbiamo già il momento di inerzia della barra attorno ad un asse che passa per il suo centro geometrico. Poiché la barra è omogenea, il suo centro di massa è in quel punto, quindi questo sarà il nostro ioCM per applicare il teorema di Steiner.
Se la lunghezza della barra è L, l'asse z è a una distanza D = L / 2, quindi:
ioz = ICM + MDDue= (1/12) MLDue+M (L / 2)Due= (1/3) MLDue

Nessun utente ha ancora commentato questo articolo.