Il algebra vettoriale è una branca della matematica incaricata di studiare sistemi di equazioni lineari, vettori, matrici, spazi vettoriali e loro trasformazioni lineari. È correlato ad aree come ingegneria, risoluzione di equazioni differenziali, analisi funzionale, ricerca operativa, computer grafica, tra gli altri..
Un altro ambito che l'algebra lineare ha adottato è la fisica, poiché attraverso questa è stato possibile sviluppare lo studio dei fenomeni fisici, descrivendoli attraverso l'uso di vettori. Ciò ha reso possibile una migliore comprensione dell'universo.
Indice articolo
L'algebra vettoriale ha avuto origine dallo studio dei quaternioni (estensione dei numeri reali) 1, i, j e k, nonché dalla geometria cartesiana promossa da Gibbs e Heaviside, che hanno capito che i vettori sarebbero serviti come strumento per rappresentare vari fenomeni fisici.
L'algebra vettoriale viene studiata attraverso tre fondamenti:
I vettori sono rappresentati da linee che hanno un orientamento e operazioni come addizione, sottrazione e moltiplicazione per numeri reali sono definite tramite metodi geometrici..
La descrizione dei vettori e delle loro operazioni viene eseguita con numeri, chiamati componenti. Questo tipo di descrizione è il risultato di una rappresentazione geometrica perché viene utilizzato un sistema di coordinate.
Viene eseguita una descrizione dei vettori, indipendentemente dal sistema di coordinate o da qualsiasi tipo di rappresentazione geometrica.
Lo studio delle figure nello spazio avviene attraverso la loro rappresentazione in un sistema di riferimento, che può essere in una o più dimensioni. Tra i principali sistemi ci sono:
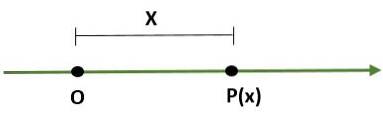
- Sistema unidimensionale, che è una linea in cui un punto (O) rappresenta l'origine e un altro punto (P) determina la scala (lunghezza) e la sua direzione:
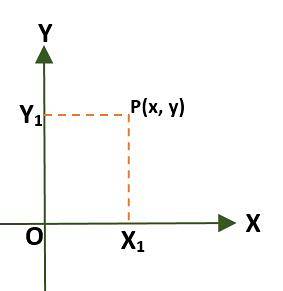
- Sistema di coordinate rettangolare (bidimensionale), costituito da due linee perpendicolari chiamate asse x e asse y, che passano per un'origine punto (O); in questo modo il piano viene diviso in quattro regioni chiamate quadranti. In questo caso un punto (P) nel piano è dato dalle distanze che esistono tra gli assi e P.
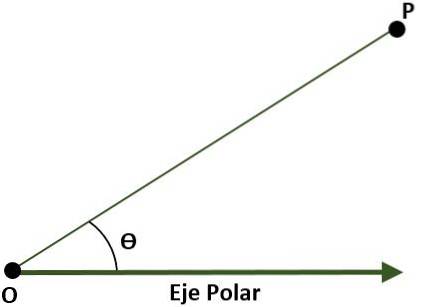
- Sistema di coordinate polari (bidimensionale). In questo caso il sistema è composto da un punto O (origine) che si chiama polo e da un raggio con origine in O chiamato asse polare. In questo caso il punto P del piano, con riferimento al polo e all'asse polare, è dato dall'angolo (Ɵ), che è formato dalla distanza tra l'origine e il punto P.
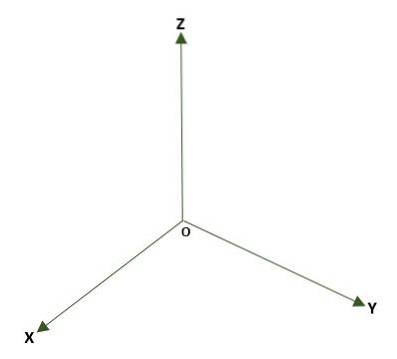
- Sistema tridimensionale rettangolare, formato da tre rette perpendicolari (x, y, z) la cui origine è un punto O nello spazio. Si formano tre piani di coordinate: xy, xz e yz; lo spazio sarà suddiviso in otto regioni chiamate ottanti. Il riferimento di un punto P nello spazio è dato dalle distanze che esistono tra i piani e P.
Una grandezza è una grandezza fisica che può essere contata o misurata tramite un valore numerico, come nel caso di alcuni fenomeni fisici; tuttavia, è spesso necessario essere in grado di descrivere questi fenomeni con fattori diversi da quelli numerici. Ecco perché le grandezze sono classificate in due tipi:
Sono quelle quantità che vengono definite e rappresentate numericamente; cioè da un modulo insieme a un'unità di misura. Per esempio:
a) Tempo: 5 secondi.
b) Massa: 10 kg.
c) Volume: 40 ml.
d) Temperatura: 40 ºC.
Sono quelle quantità che sono definite e rappresentate da un modulo insieme a un'unità, oltre che da un senso e una direzione. Per esempio:
a) Velocità: (5ȋ - 3ĵ) m / s.
b) Accelerazione: 13 m / sDue; S 45º E.
c) Forza: 280 N, 120º.
d) Peso: -40 ĵ kg-f.
Le quantità vettoriali sono rappresentate graficamente da vettori.
I vettori sono rappresentazioni grafiche di una quantità di vettore; cioè, sono segmenti di linea in cui la loro estremità finale è la punta di una freccia.
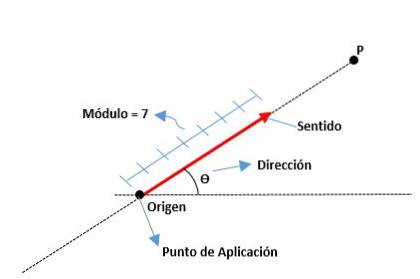
Questi sono determinati dal suo modulo o dalla lunghezza del segmento, dalla sua direzione, che è indicata dalla punta della sua freccia, e dalla sua direzione in base alla linea a cui appartiene. L'origine di un vettore è anche nota come punto di applicazione.
Gli elementi di un vettore sono i seguenti:
È la distanza dall'origine alla fine di un vettore, rappresentata da un numero reale insieme a un'unità. Per esempio:
| OM | = | A | = A = 6 cm
È la misura dell'angolo che esiste tra l'asse x (dal positivo) e il vettore, così come vengono utilizzati i punti cardinali (nord, sud, est e ovest).
È dato dalla punta della freccia situata all'estremità del vettore, che indica dove sta andando.
Generalmente, i vettori sono classificati come:
È uno il cui punto di applicazione (origine) è fisso; cioè, rimane collegato a un punto nello spazio, quindi non può spostarsi in questo.
Può muoversi liberamente nello spazio perché la sua origine si sposta in qualsiasi punto senza cambiare modulo, direzione o direzione..
È uno che può trasferire la sua origine lungo la sua linea di azione senza cambiarne il modulo, la direzione o la direzione..
Tra le principali proprietà dei vettori ci sono le seguenti:
Sono quei vettori liberi che hanno lo stesso modulo, direzione (o sono paralleli) e senso come un vettore scorrevole o un vettore fisso.
Si verifica quando due vettori hanno la stessa direzione (o sono paralleli), lo stesso senso e, pur avendo moduli e punti di applicazione diversi, provocano gli stessi effetti.
Questi hanno lo stesso modulo, direzione e senso, anche quando i loro punti di partenza sono diversi, il che consente a un vettore parallelo di tradursi senza influenzarlo..
Sono quelli che hanno lo stesso modulo e direzione, ma il loro senso è opposto.
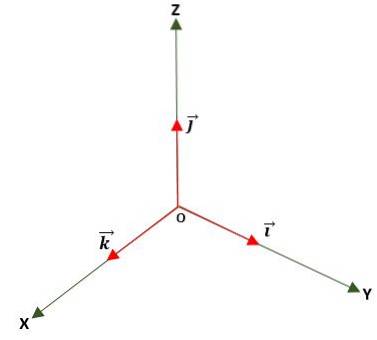
È quello in cui il modulo è uguale all'unità (1). Questo si ottiene dividendo il vettore per il suo modulo e viene utilizzato per determinare la direzione e il senso di un vettore, nel piano o nello spazio, utilizzando i vettori unitari di base o normalizzati, che sono:
È quello il cui modulo è uguale a 0; cioè, il suo punto di origine e fine coincidono nello stesso punto.
Le componenti di un vettore sono quei valori delle proiezioni del vettore sugli assi del sistema di riferimento; A seconda della decomposizione del vettore, che può essere su due o tre assi, si ottengono rispettivamente due o tre componenti..
I componenti di un vettore sono numeri reali, che possono essere positivi, negativi o addirittura zero (0).
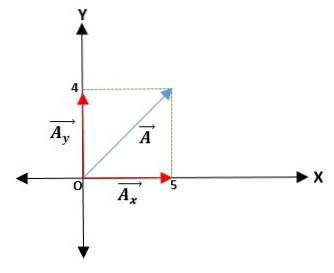
Quindi, se abbiamo un vettore Ā, con origine in un sistema di coordinate rettangolari nel piano xy (bidimensionale), la proiezione sull'asse x è Āx e la proiezione sull'asse y è Āy. Pertanto, il vettore sarà espresso come la somma dei suoi vettori componenti.
Abbiamo un vettore Ā che parte dall'origine e vengono fornite le coordinate dei suoi estremi. Pertanto, il vettore Ā = (ĀX; PERY) = (4; 5) cm.
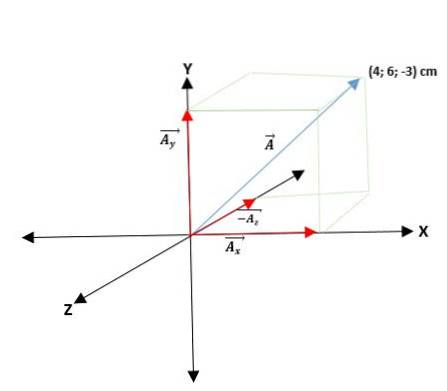
Se il vettore Ā agisce all'origine di un sistema di coordinate triangolari tridimensionali (nello spazio) x, y, z, verso un altro punto (P), le proiezioni sui suoi assi saranno Āx, Āy e Āz; quindi, il vettore sarà espresso come la somma dei suoi tre vettori componenti.
Abbiamo un vettore Ā che parte dall'origine e vengono fornite le coordinate dei suoi estremi. Pertanto, il vettore Ā = (AX; PERY; PERz) = (4; 6; -3) cm.
I vettori che hanno le loro coordinate rettangolari possono essere espressi in termini di vettori di base. Per questo, devi solo moltiplicare ogni coordinata per il suo rispettivo vettore unitario, in modo tale che per il piano e lo spazio siano i seguenti:
Per l'aereo: Ā = AXi + AYj.
Per lo spazio: Ā = AXi + AYj + AzK.
Ci sono molte quantità che hanno un modulo, un senso e una direzione, come accelerazione, velocità, spostamento, forza, tra gli altri..
Questi sono applicati in varie aree della scienza e per applicarli è necessario in alcuni casi eseguire operazioni come addizione, sottrazione, moltiplicazione e divisione di vettori e scalari..
L'addizione e la sottrazione di vettori è considerata una singola operazione algebrica perché la sottrazione può essere scritta come una somma; ad esempio, la sottrazione dei vettori Ā e Ē può essere espressa come:
Ā - Ē = Ā + (-Ē)
Esistono diversi metodi per eseguire l'addizione e la sottrazione di vettori: possono essere grafici o analitici.
Utilizzato quando un vettore ha un modulo, un senso e una direzione. Per questo, vengono disegnate delle linee che formano una figura che in seguito aiuta a determinare il risultato. Tra i più noti ci sono i seguenti:
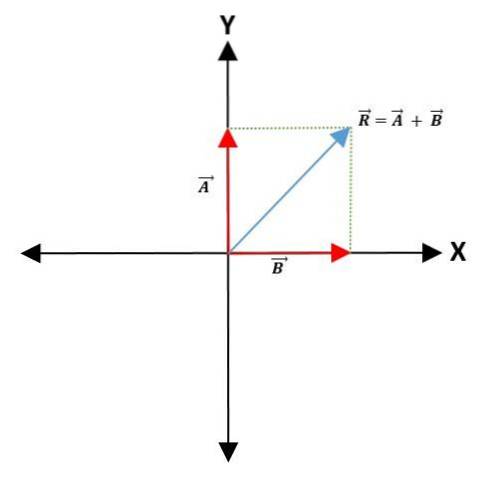
Per fare l'addizione o la sottrazione di due vettori si sceglie un punto comune sull'asse delle coordinate, che rappresenterà il punto di origine dei vettori, mantenendone modulo, direzione e direzione..
Le linee vengono quindi tracciate parallelamente ai vettori per formare un parallelogramma. Il vettore risultante è la diagonale che va dal punto di origine di entrambi i vettori al vertice del parallelogramma:
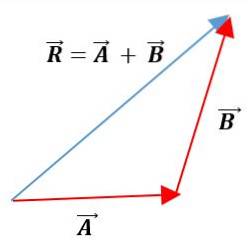
In questo metodo i vettori vengono posizionati uno dopo l'altro, mantenendo i loro moduli, direzioni e direzioni. Il vettore risultante sarà l'unione dell'origine del primo vettore con la fine del secondo vettore:
È possibile aggiungere o sottrarre due o più vettori mediante un metodo geometrico o vettoriale:
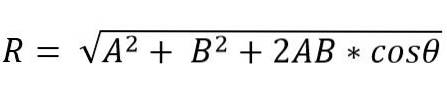
Quando due vettori formano un triangolo o un parallelogramma, il modulo e la direzione del vettore risultante possono essere determinati utilizzando le leggi del seno e del coseno. Pertanto, il modulo del vettore risultante, applicando la legge del coseno e con il metodo del triangolo, è dato da:
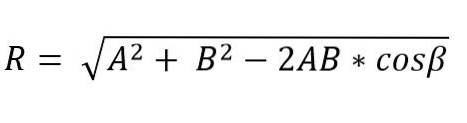
In questa formula β è l'angolo opposto al lato R, e questo è uguale a 180º - Ɵ.
Invece, con il metodo del parallelogramma, il modulo del vettore risultante è:
La direzione del vettore risultante è data dall'angolo (α), che forma la risultante con uno dei vettori.
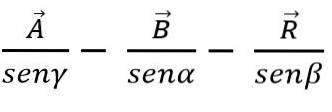
Per la legge del seno, l'addizione o la sottrazione di vettori può essere effettuata anche con il metodo del triangolo o del parallelogramma, sapendo che in ogni triangolo i lati sono proporzionali ai seni degli angoli:
Questo può essere fatto in due modi: a seconda delle sue coordinate rettangolari o dei suoi vettori di base.
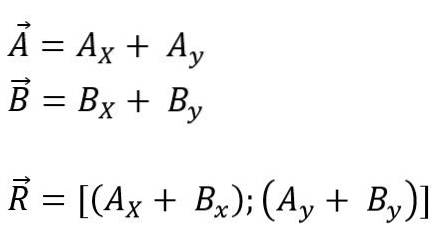
Può essere fatto traslando i vettori da sommare o sottrarre verso l'origine delle coordinate, quindi tutte le proiezioni su ciascuno degli assi per il piano (x, y) o lo spazio (x e Z); infine, i suoi componenti vengono aggiunti algebricamente. Quindi per l'aereo è:
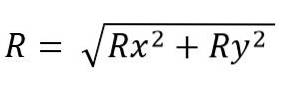
Il modulo del vettore risultante è:
Mentre per lo spazio è:
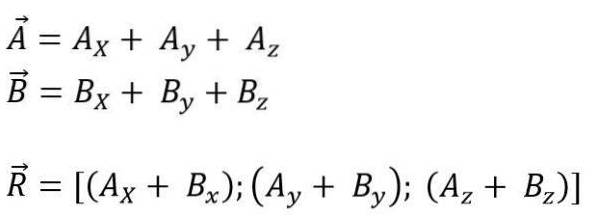
Il modulo del vettore risultante è:

Quando vengono eseguite le somme vettoriali, vengono applicate diverse proprietà, che sono:
- Proprietà associativa: la risultante non cambia quando si aggiungono prima due vettori e poi si aggiunge un terzo vettore.
- Proprietà commutativa: l'ordine dei vettori non altera la risultante.
- Proprietà distributiva del vettore: se uno scalare viene moltiplicato per la somma di due vettori, è uguale alla moltiplicazione dello scalare per ciascun vettore.
- Proprietà distributiva scalare: se un vettore viene moltiplicato per la somma di due scalari, è uguale alla moltiplicazione del vettore per ogni scalare.
La moltiplicazione o il prodotto di vettori potrebbe essere fatta come addizione o sottrazione, ma così facendo perde il significato fisico e non si trova quasi mai nelle applicazioni. Pertanto, generalmente i tipi di prodotti più utilizzati sono il prodotto scalare e vettoriale.
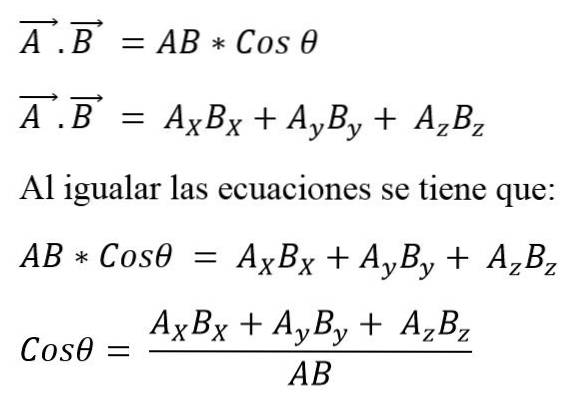
È anche noto come prodotto scalare di due vettori. Quando i moduli di due vettori vengono moltiplicati per il coseno dell'angolo più piccolo formato tra di loro, si ottiene uno scalare. Per esprimere un prodotto scalare tra due vettori, viene posto un punto tra di loro e questo può essere definito come:
Il valore dell'angolo che esiste tra i due vettori dipenderà dal fatto che siano paralleli o perpendicolari; quindi, devi:
- Se i vettori sono paralleli e hanno lo stesso senso, coseno 0º = 1.
- Se i vettori sono paralleli e hanno direzioni opposte, coseno 180º = -1.
- Se i vettori sono perpendicolari, coseno 90º = 0.
Quell'angolo può anche essere calcolato sapendo che:
Il prodotto dot ha le seguenti proprietà:
- Proprietà commutativa: l'ordine dei vettori non altera lo scalare.
-Proprietà distributiva: se uno scalare è moltiplicato per la somma di due vettori, è uguale alla moltiplicazione dello scalare per ogni vettore.
La moltiplicazione vettoriale, o prodotto incrociato di due vettori A e B, si tradurrà in un nuovo vettore C ed è espresso utilizzando un incrocio tra i vettori:
Il nuovo vettore avrà le sue caratteristiche. Quel modo:
- La direzione: questo nuovo vettore sarà perpendicolare al piano, che è determinato dai vettori originali.
- La direzione: questa è determinata con la regola della mano destra, dove il vettore A viene ruotato verso B, indicando il senso di rotazione con le dita, e la direzione del vettore è contrassegnata con il pollice.
- Il modulo: è determinato dalla moltiplicazione dei moduli dei vettori AxB, dal seno dell'angolo più piccolo che esiste tra questi vettori. È espresso:
Il valore dell'angolo che esiste tra i due vettori dipenderà dal fatto che siano paralleli o perpendicolari. Quindi è possibile affermare quanto segue:
- Se i vettori sono paralleli e hanno lo stesso senso, seno 0º = 0.
- Se i vettori sono paralleli e hanno direzioni opposte, seno 180º = 0.
- Se i vettori sono perpendicolari, seno 90º = 1.
Quando un prodotto vettoriale è espresso in funzione dei suoi vettori di base, abbiamo:

Il prodotto dot ha le seguenti proprietà:
- Non è commutativo: l'ordine dei vettori altera lo scalare.
- Proprietà distributiva: se uno scalare viene moltiplicato per la somma di due vettori, è uguale alla moltiplicazione dello scalare per ciascun vettore.


Nessun utente ha ancora commentato questo articolo.